Vamos a montar en primer lugar el portapilas, el interruptor, el controlador de motores y los motores.
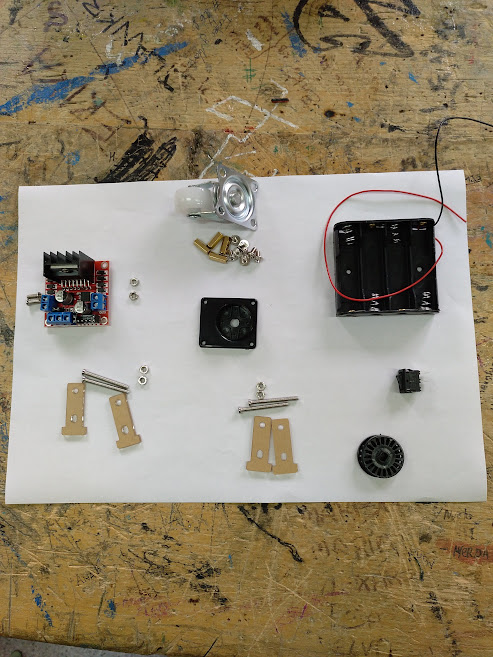
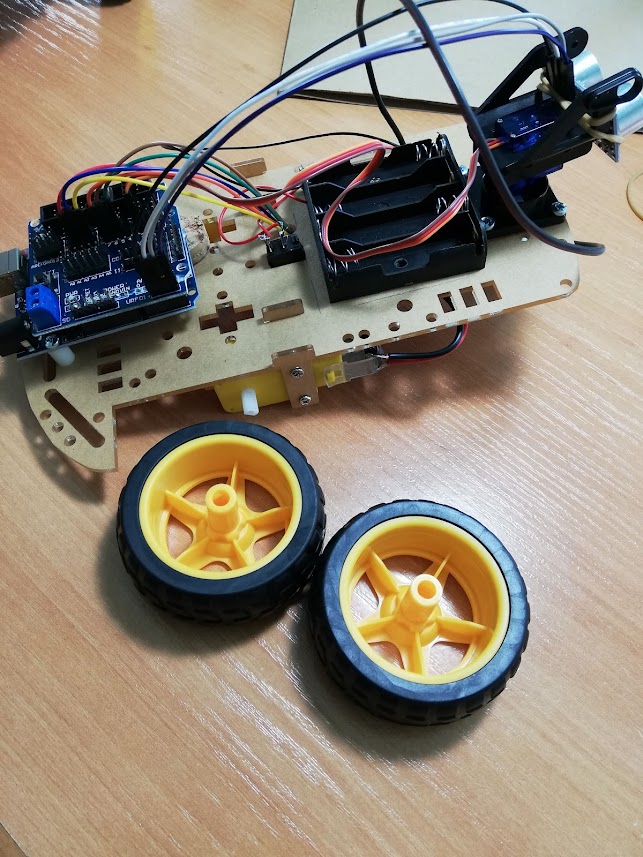
Para ello sacamos los materiales que se ven en la foto:
El chasis es simétrico y está recubierto con una protección de papelkraft (no quitarsela pues si tenemos que pegar algo el metacrilato es peor que esta protección, si usamos silicona por ejemplo), por poner un orden vamos a definir la parte de abajo ( la que lleva los motores, el controlador de motores y la rueda loca) la que lleva serigrafia (letras y dibujos) en el papelkraft.
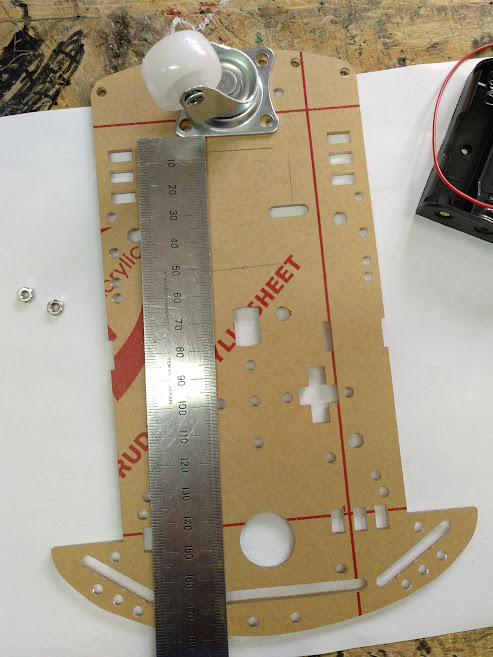
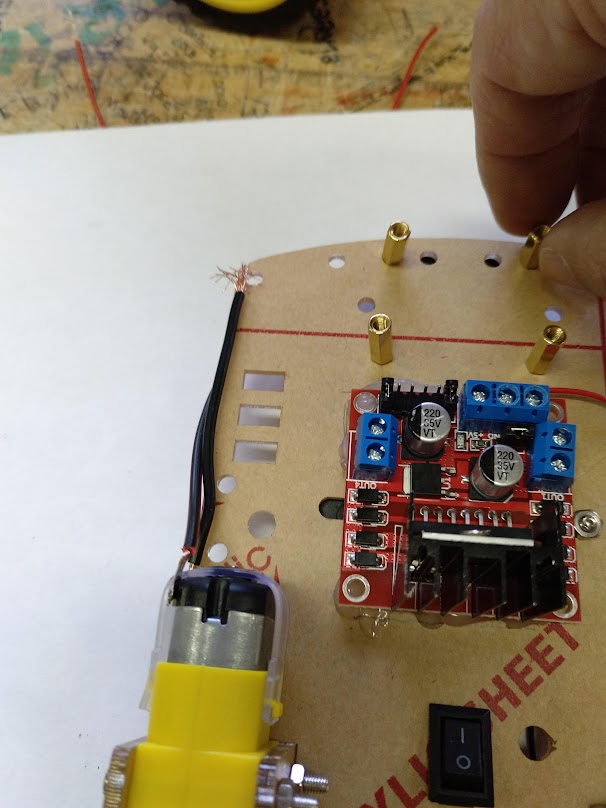
Ahora ponemos la rueda loca sobre los taladros a los que va ir unida y marcamos con un lápiz a 7 mm, de esta, cogemos el controlador de motores y marcamos con un lápiz los límites aproximados donde va a ir colocado, como se ve en la siguiente foto:
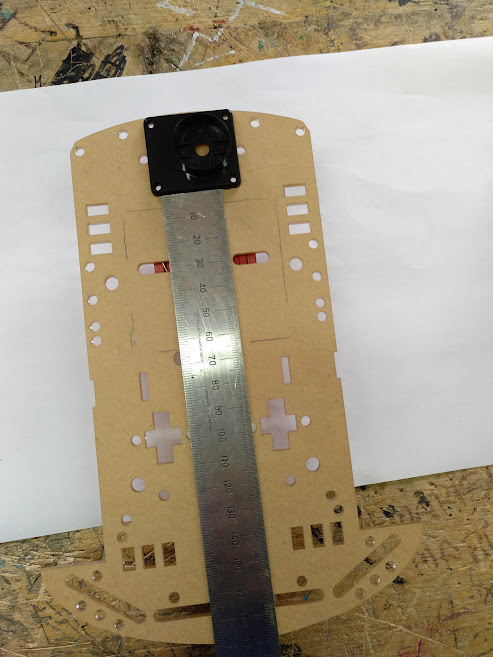
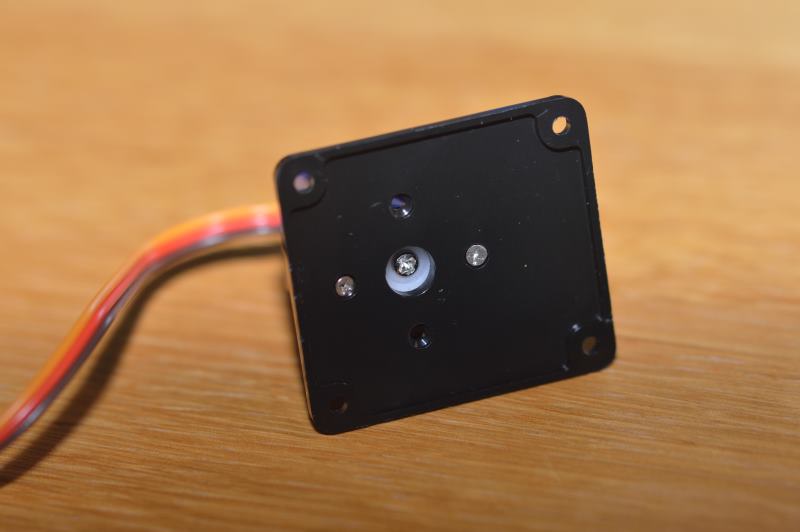
Le damos la vuelta al chasis, cogemos el soporte del servomotor y lo encaramos como se ven en la foto sobre sus taladros, y medimos 5 mm, y marcamos con el soporte de las pilas de manera aproximada, como se ve en la foto:
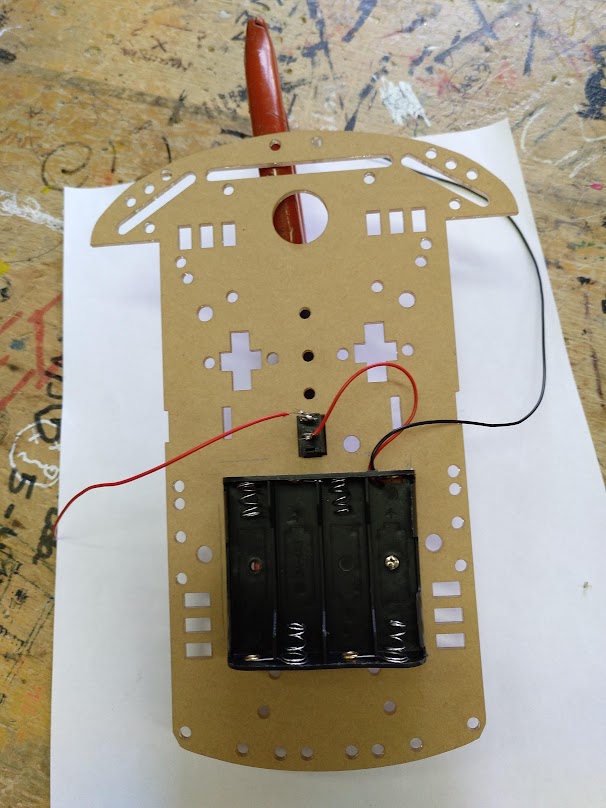
Cogemos los cables del soporte de las pilas y los sacamos, como se ve en la foto:

Metemos el negro por arriba y el rojo por abajo, como se ve en la foto:

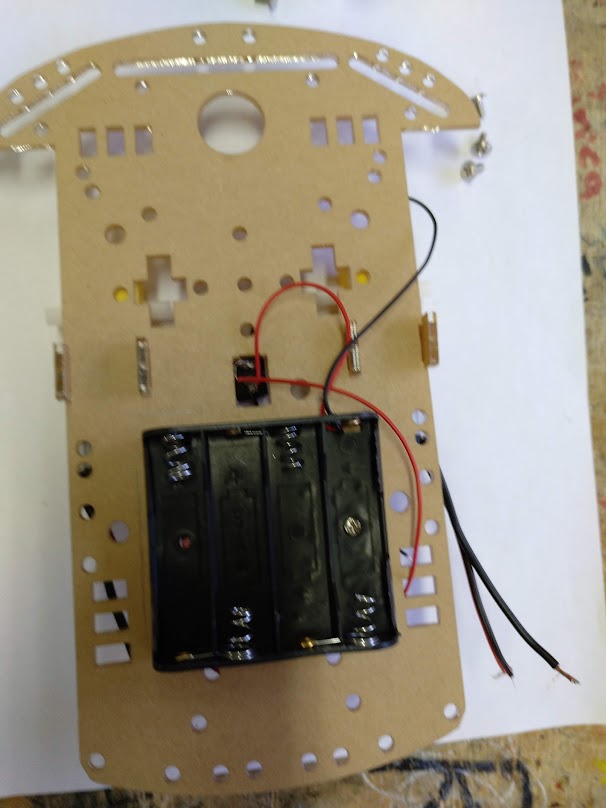
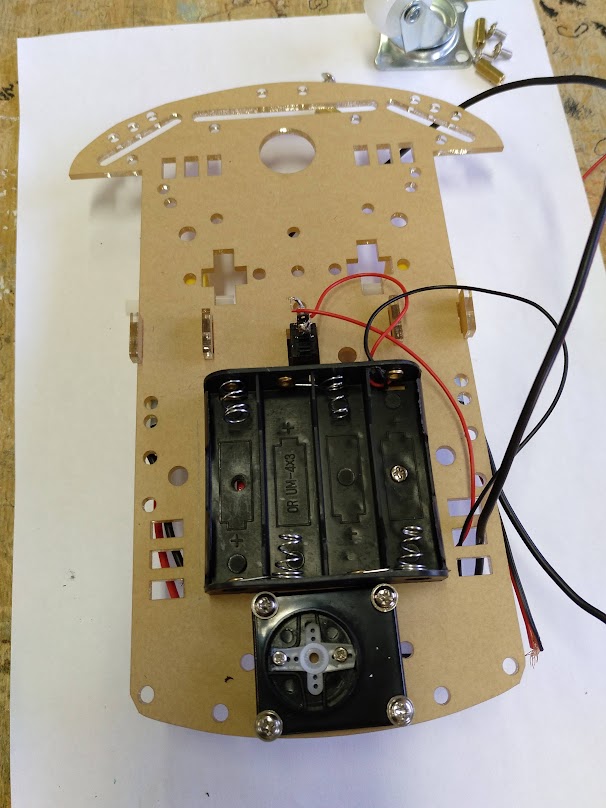
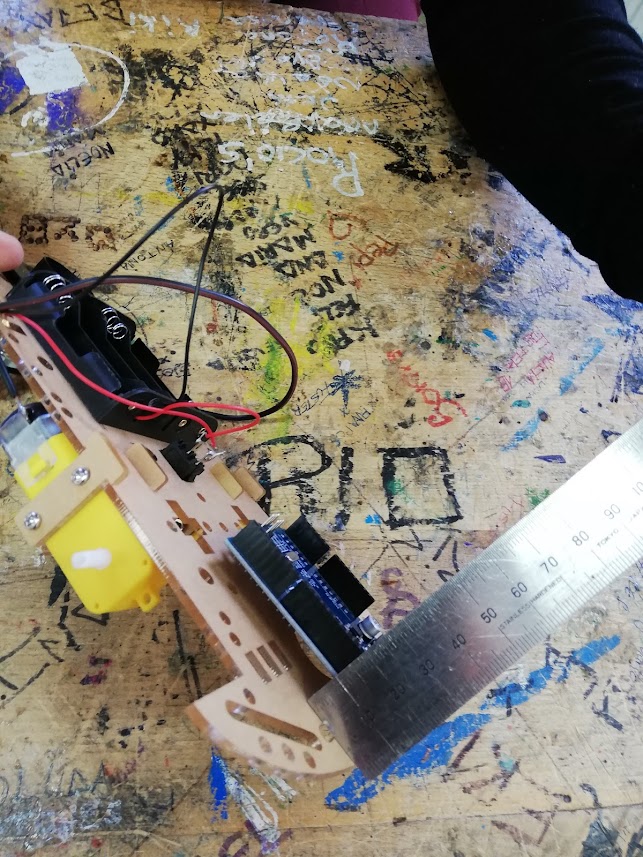
Sujetamos con un tornillo el soporte para las pilas, buscando el hueco más adecuado, como se ve en la foto:

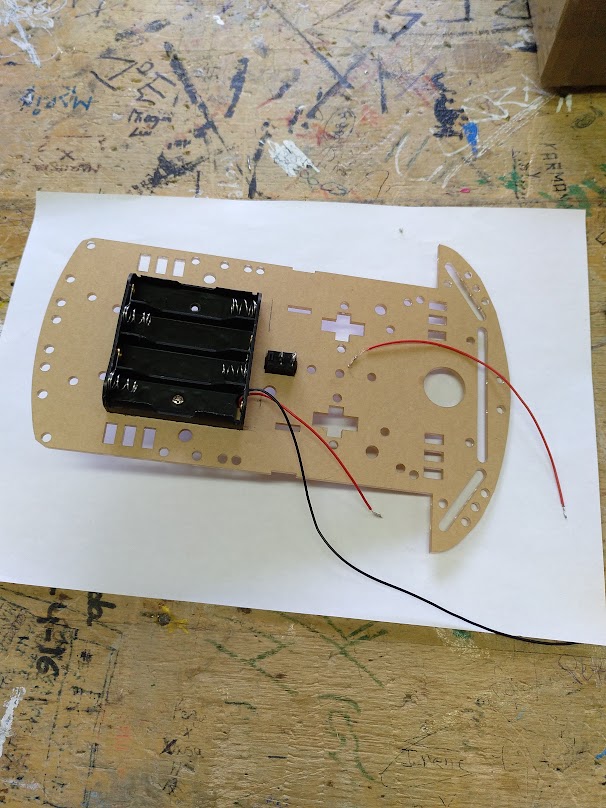
Como vemos el cable rojo se ha partido y se ha pelado para poder soldarlo al interruptor (esto lo hará el profesor con unos pocos alumnos que sepan hacerlo, preguntar antes si lo vais a hacer vosotros).
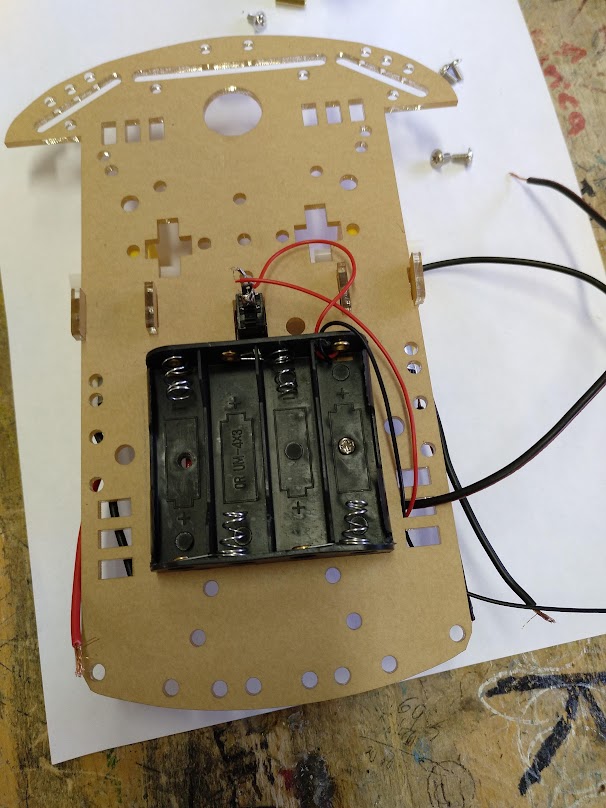
Se suelda el cable rojo al interruptor, tal como se ve en la foto siguiente:
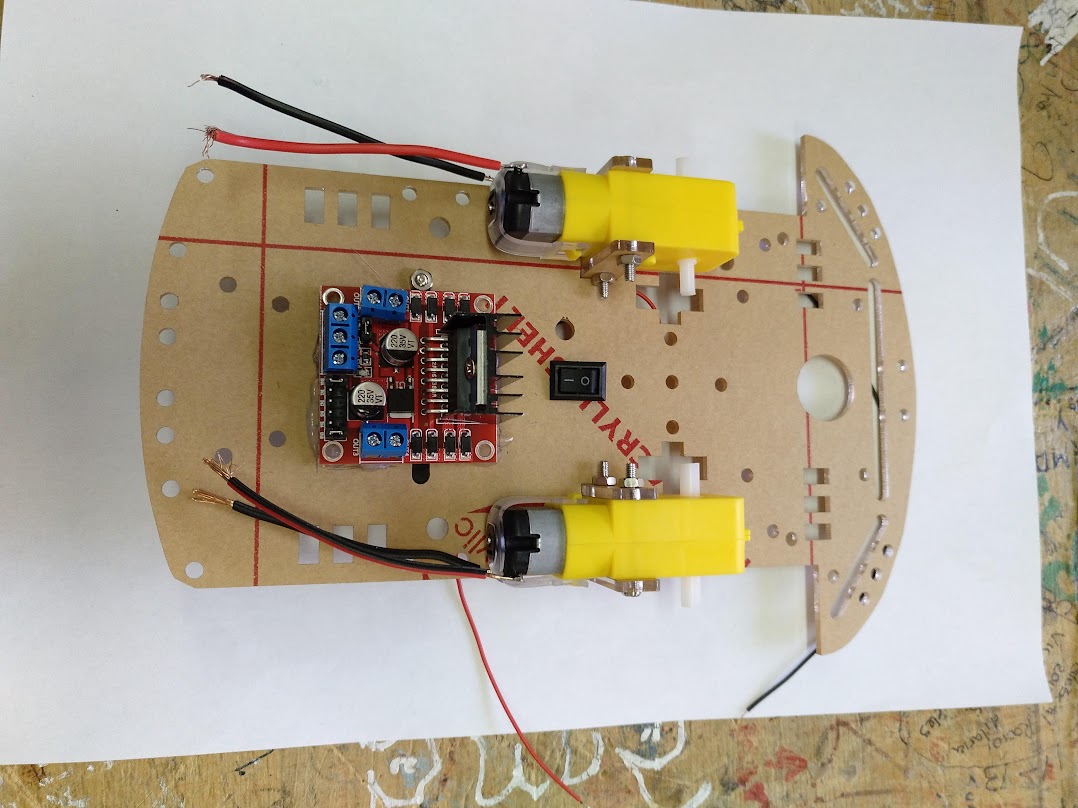
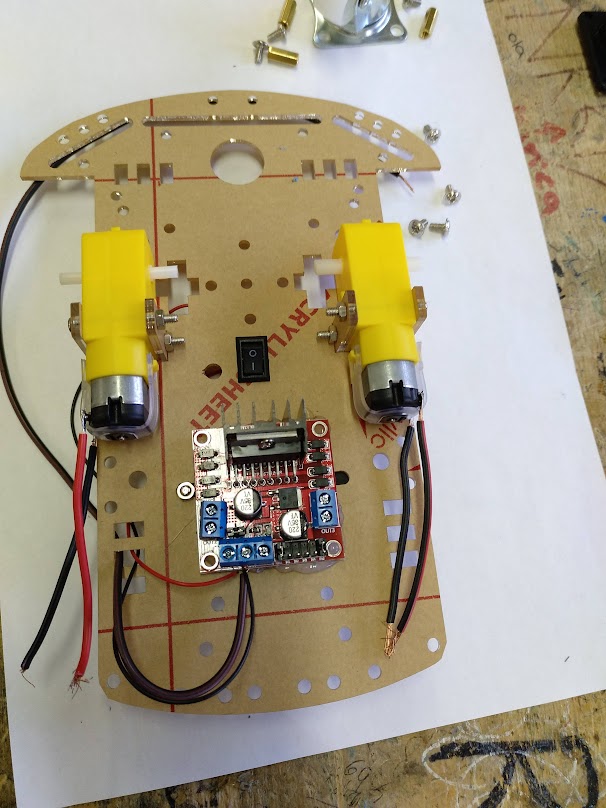
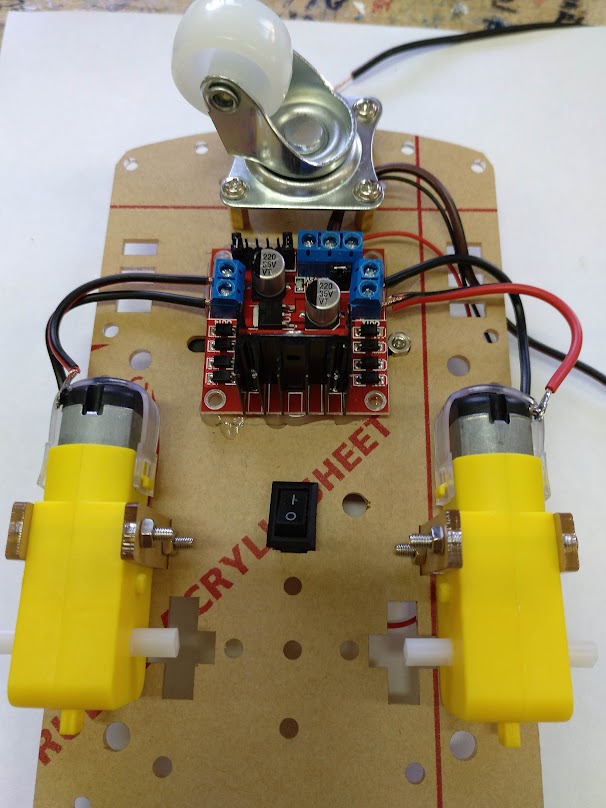
Se preparan los motores y se colocan en el chasis, tal como se aprecia en la foto siguiente:
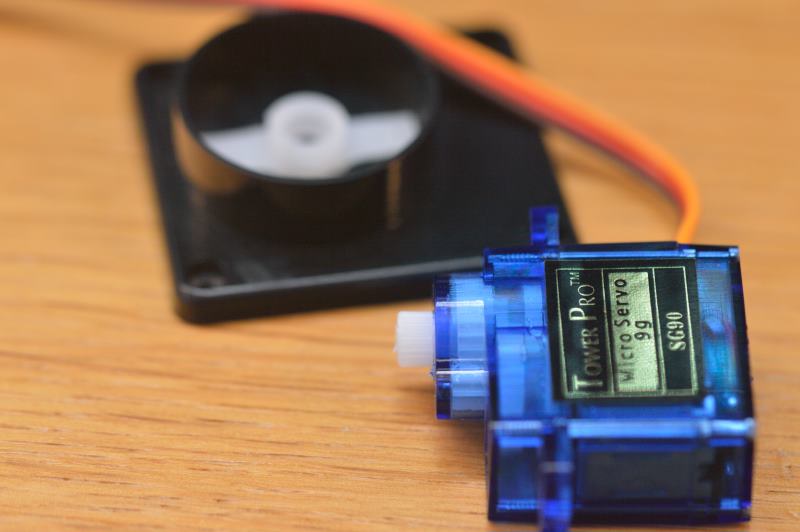
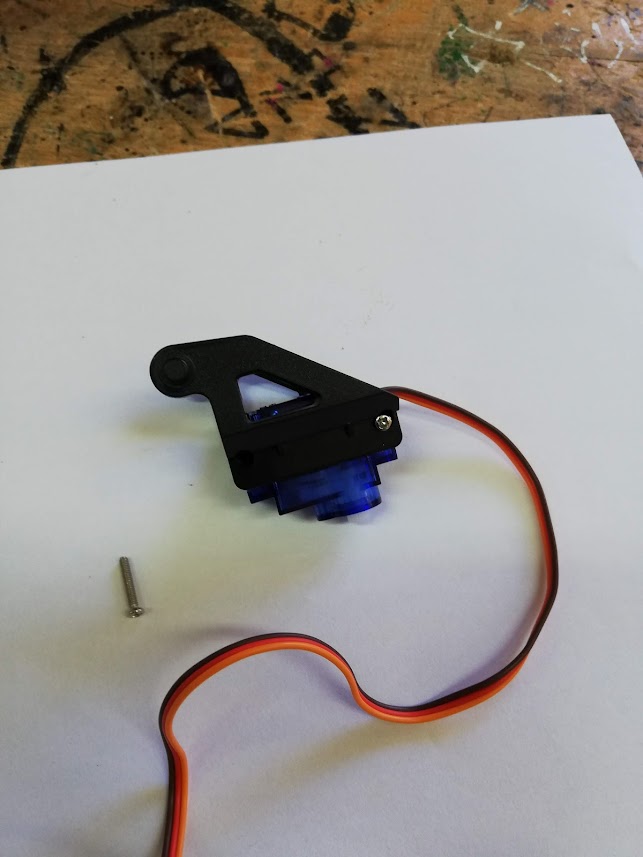
Montamos ahora el soporte del servo, para ello vemos en la foto siguiente el material necesario:

Marcamos para cortar lo que sobra de la pieza de plástico blanco, como se ven la fotografía siguiente:

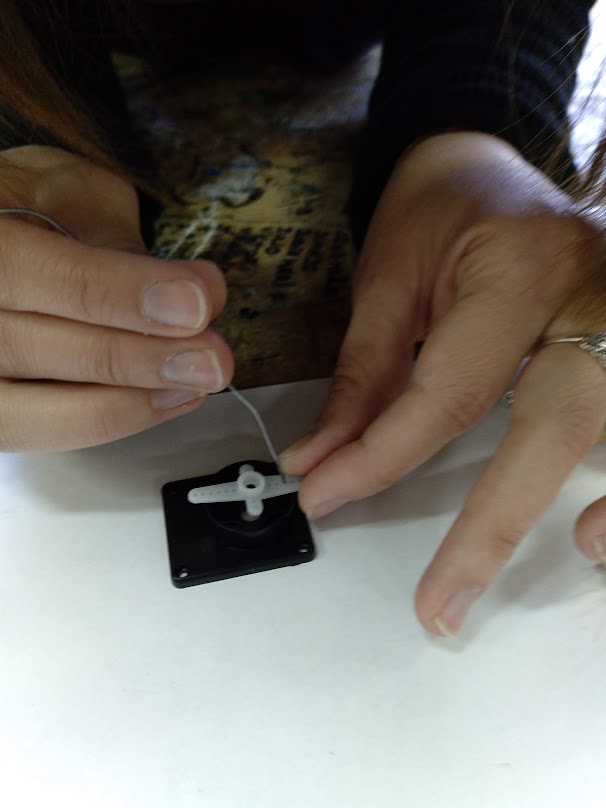
Nos aseguramos con un clip o un alambre de que el agujero coincide con el agujero de la pieza negra, como se ve en la foto:
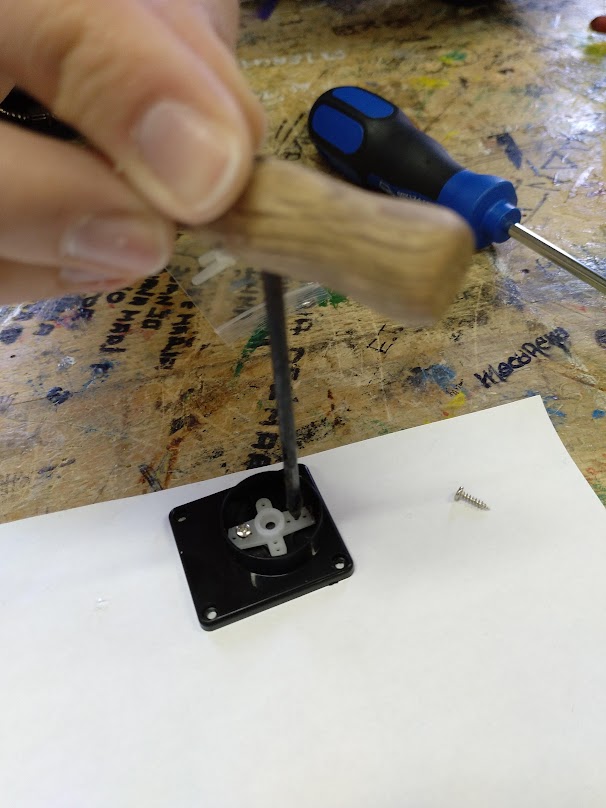
Cortamos la pieza con unos alicates de corte (pidelos) y la atornillamos como se ve en la foto ( puede ser con un tornillo, o preferentemente con los dos ).

Para el segundo tornillo podemos ayudarnos con una barrena ( pidela) como se ve en la foto:
Ahora pasamos los cables rojo y negro del portapilas a la parte de abajo, como se ven en la foto:
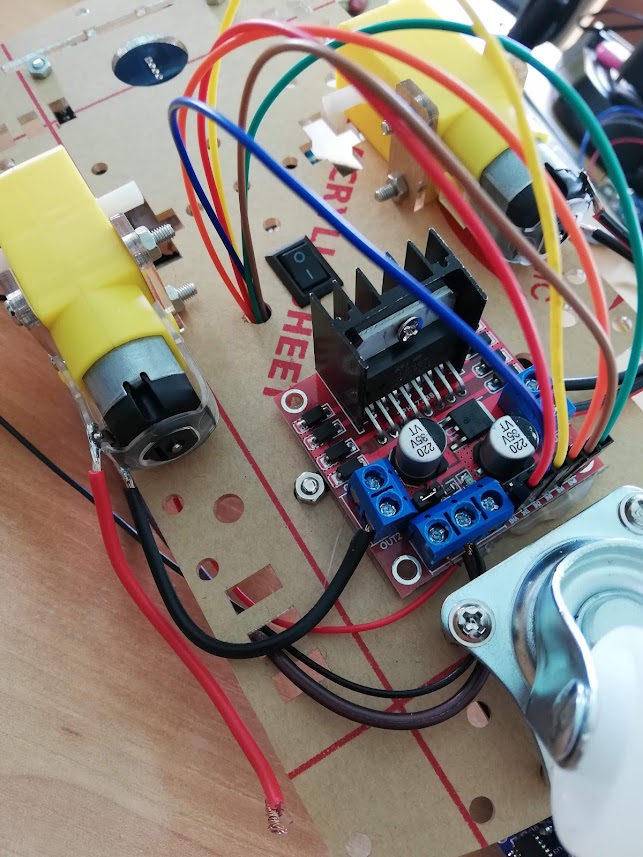
Quedando el rojo conectado al primer conector del controlador de motores, tal como se ve en la foto:
Ahora pasamos el cable negro del portapilas, junto con otro cable negro largo (tiene que llegar al otro extremo del chasis para conectarse a a la placa arduino), tal como se ven en la foto:
Conectamos los dos negros al segundo conector del controlador de motores, tal como se ven en la foto:
Empezamos a colocar los tornillos (los pequeños que vienen con el kit) en el soporte del servo, para ello utilizamos la barrena con mucho cuidado para no romper el hueco del tornillo, pero a la vez hacerlo un poquito más grande tal y como se ve en la foto:

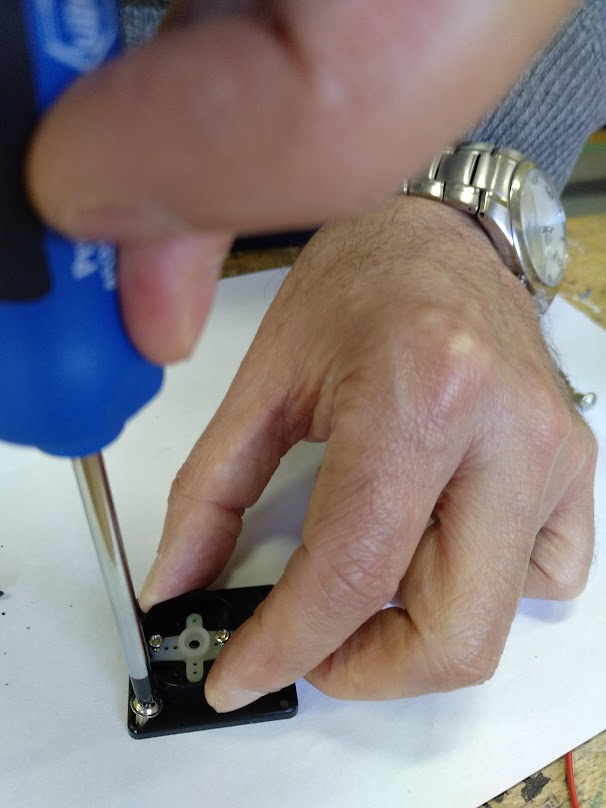
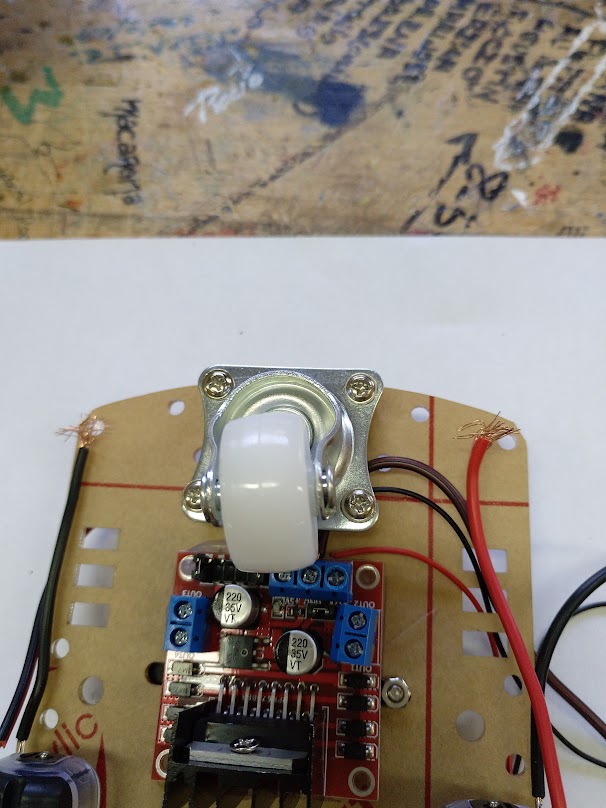
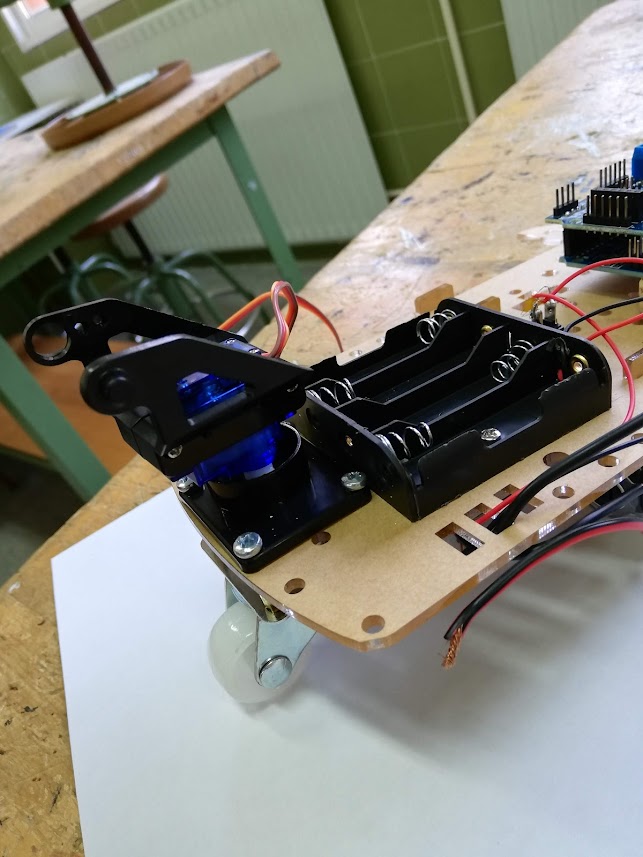
Antes de fijarlo debemos poner el servomotor y ver si es capaz de girar 180 º, y podemos incluso fijarlo por debajo con un tornillo, como se ve en las fotos siguientes:
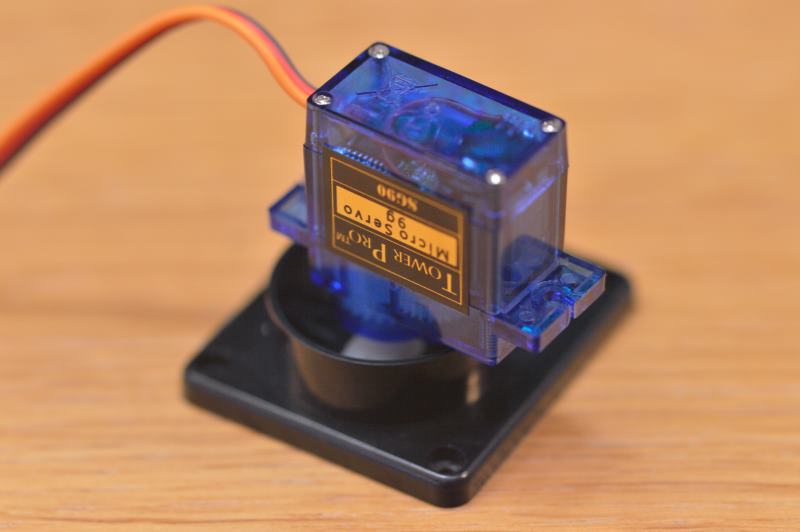
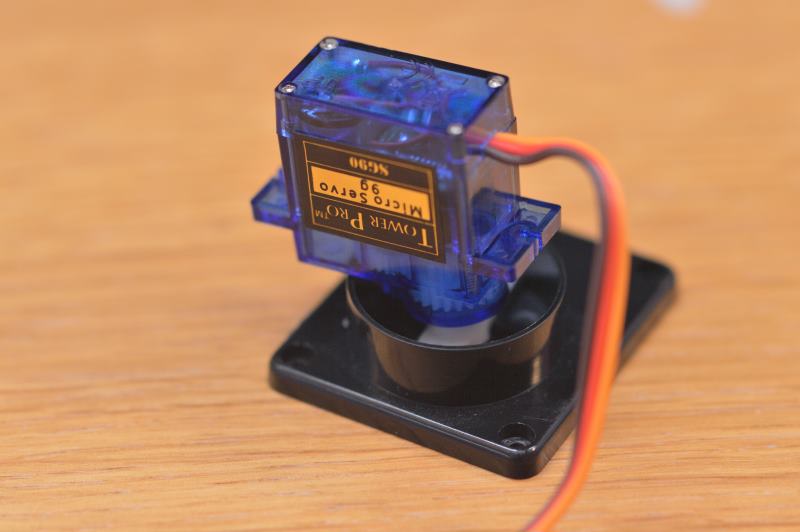
Introduce el tornillo más grande que viene con los accesorio del servo-motor por la parte inferior del soporte para fijar el eje del servo-motor al soporte.

Ya lo tenemos prefijado por una parte como se ve en la foto:
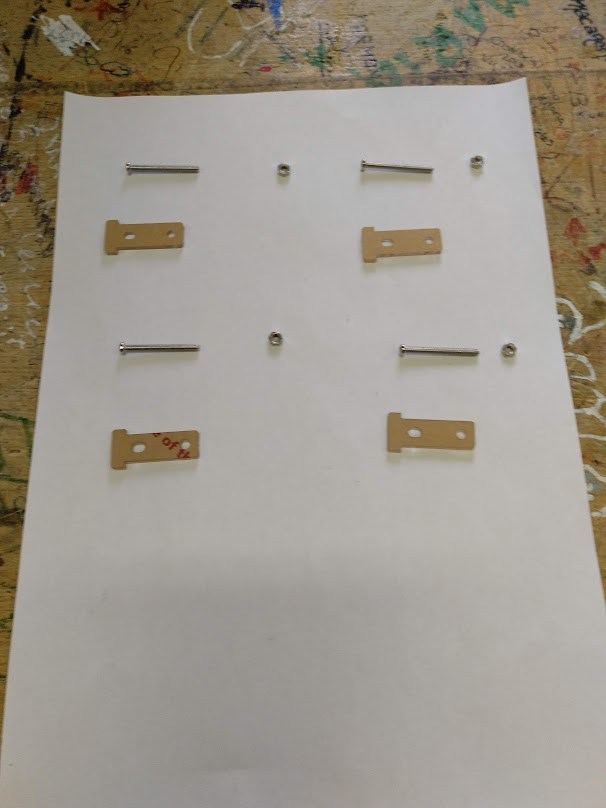
Pedimos al profesor 4 tornillos de M3x10 mm, para la otra parte donde va la rueda loca, tal como se ven en la foto:

Los encaramos, como se ve en la foto:

Le enroscamos los casquillos de doble entrada sin apretarlos del todo, como se ve en la foto:
Con los cuatro tornillos mencionado y la rueda loca, vamos apretando, hasta conseguir que quede más o menos segura, apretando solo lo necesario, y poco a poco cada uno, como se ve en la foto:
Fijamos ahora los cables de los motores al controlador de motores, tal como se ve en la foto:
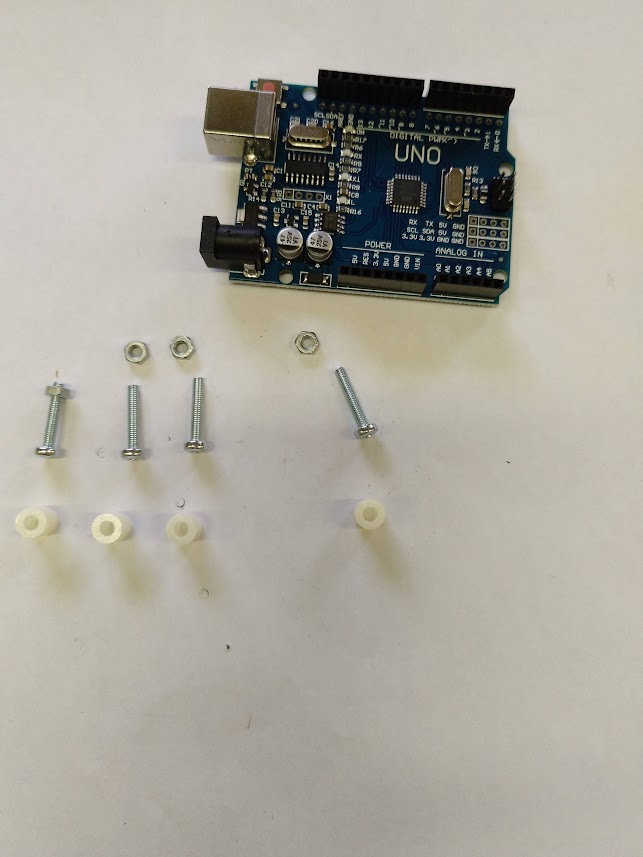
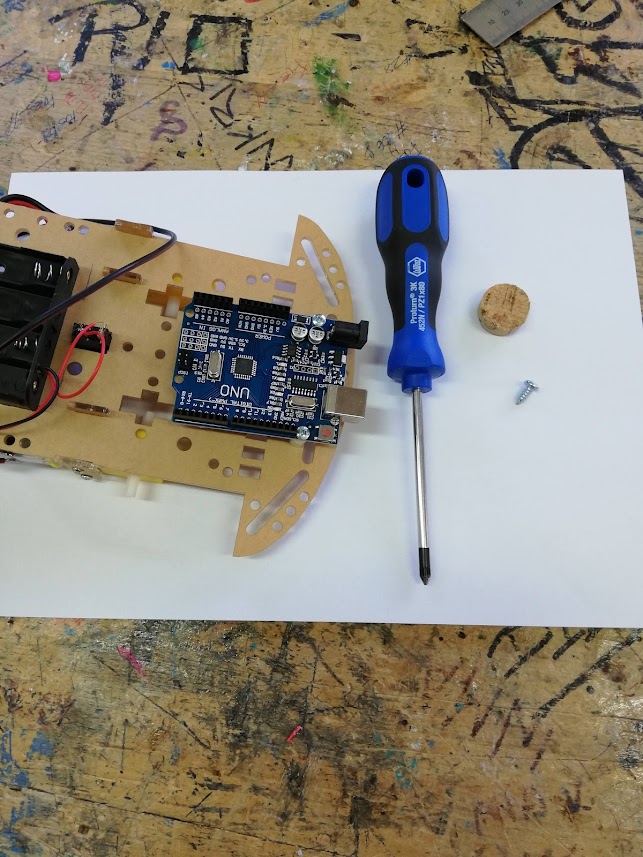
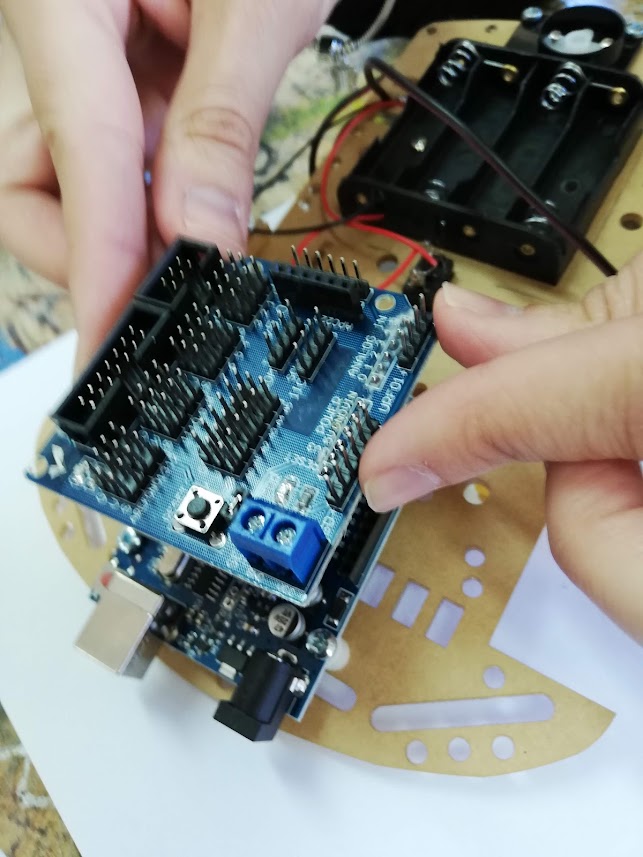
Ahora cogemos la placa Arduino, 4 casquillos de 8 mm. y 2 tornillos de M3 x 16 mm con sus tuercas(estas dos últimas cosas pideselas al profesor), como los que se ven en la foto (pero solo dos, no cuatro como aparecen en la foto):

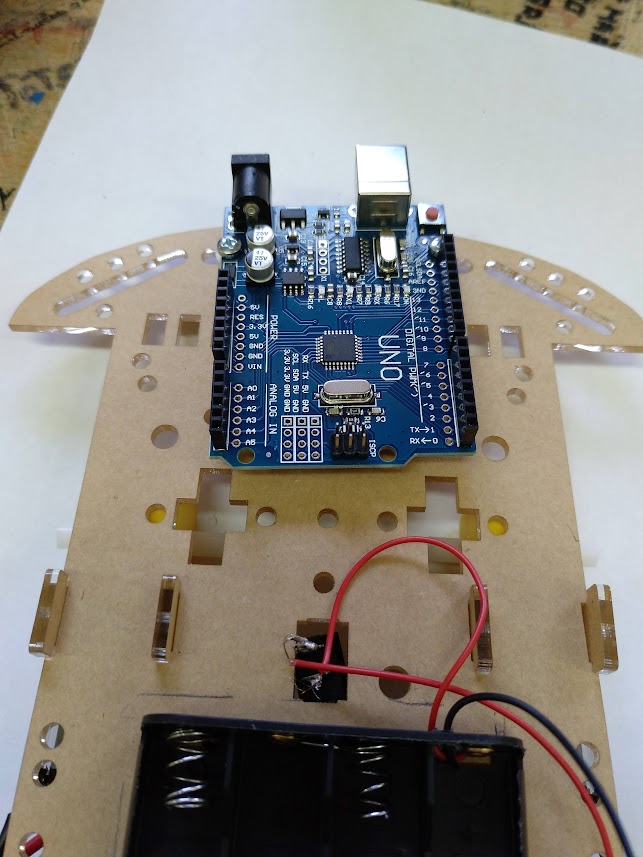
Encaramos la placa en los dos taladros superiores, y colocando los casquillos entremedias, ponemos los tornillos con sus tuercas y los apretamos, como podemos ver en la foto:
Quedando:
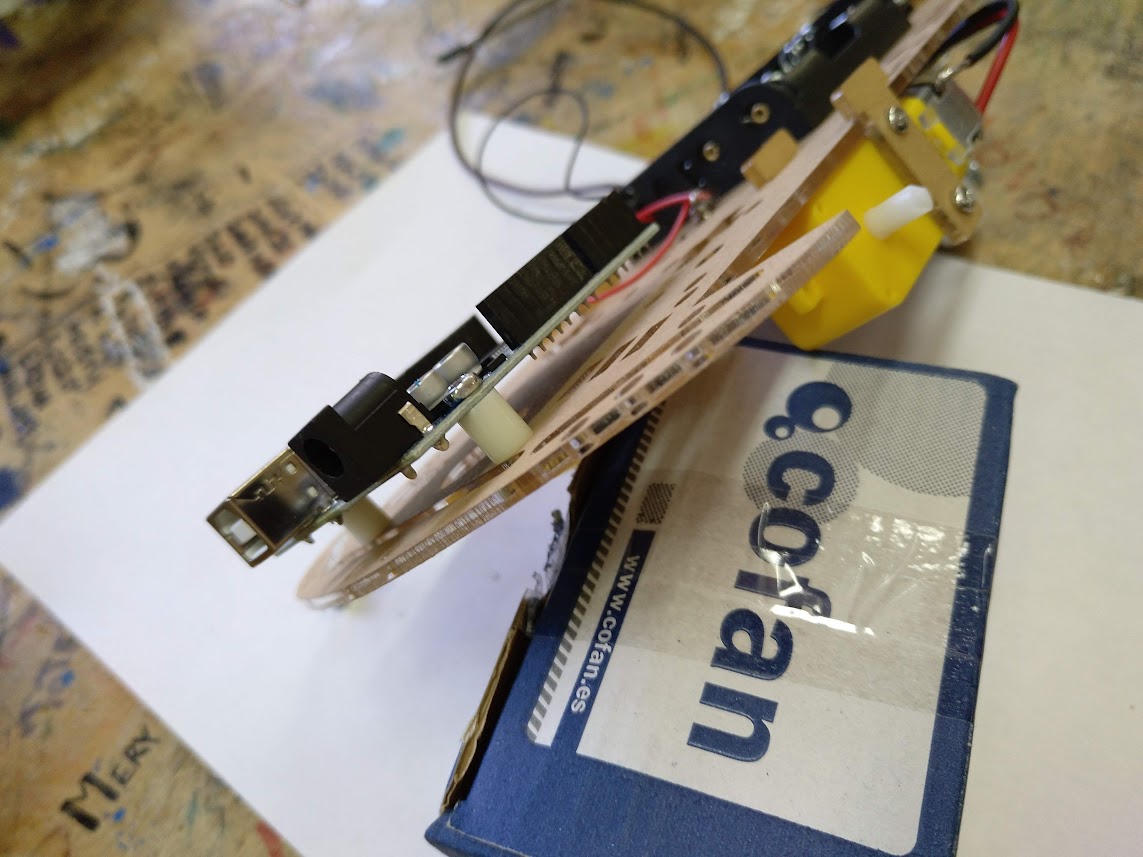
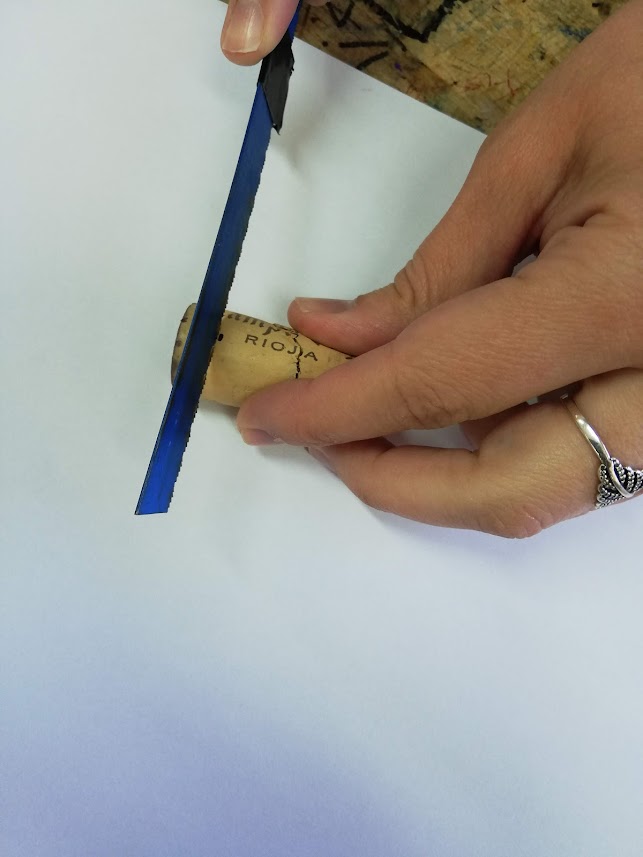
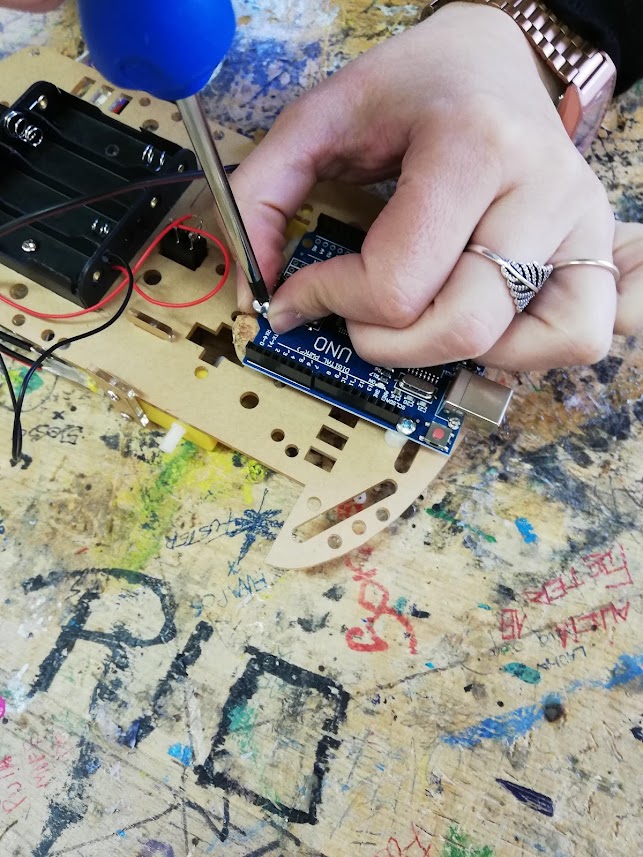
Medís la distancia entre el chasis y la parte final de la placa Arduino (aproximadamente un centímetro), para cortar con una sierra un trozo de corcho (por ejemplo) y con un tornillo rosca (pedirlo al profesor) ajustarlo en esa parte para que si presionamos al colocar componentes no se parta la placa, como se observa en las fotos:
Pasamos ahora a colocar los laterales del soporte del servomotor (aquí se ve suelto, pero lo tenemos que tener ya fijado al soporte que esta unido al chasis).


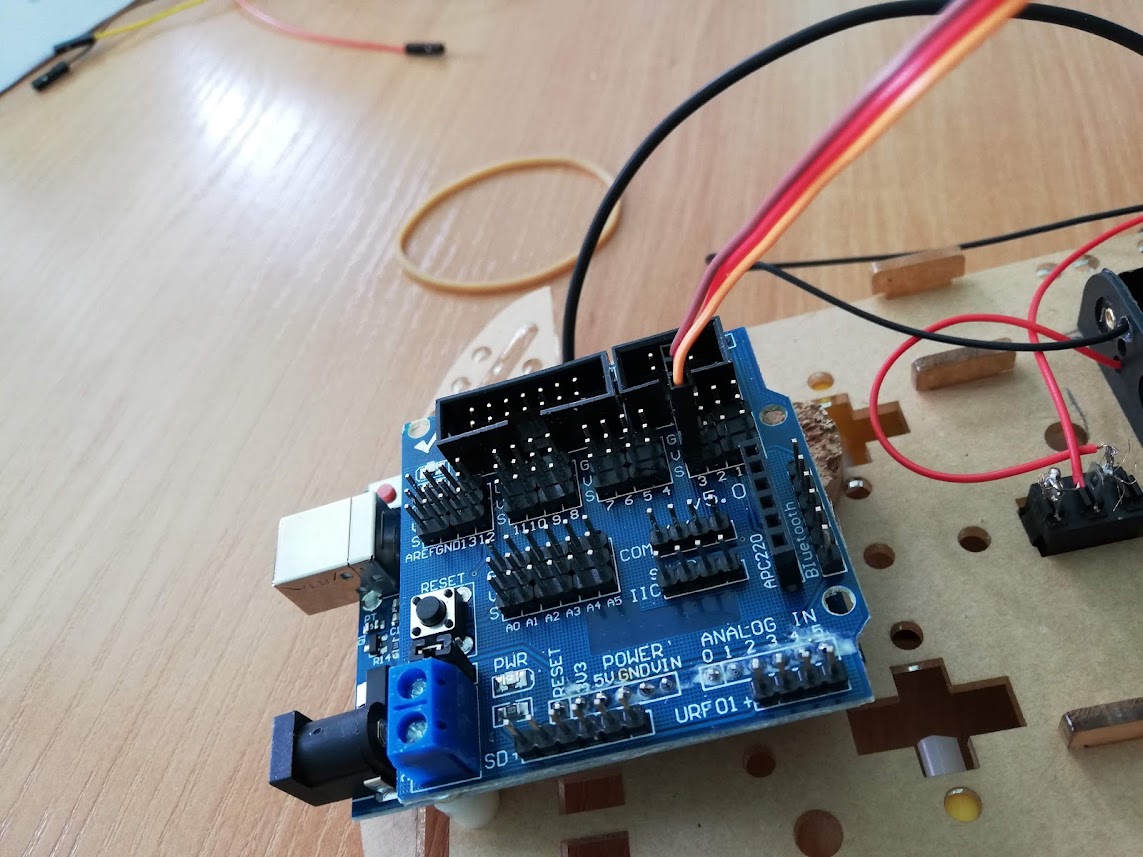
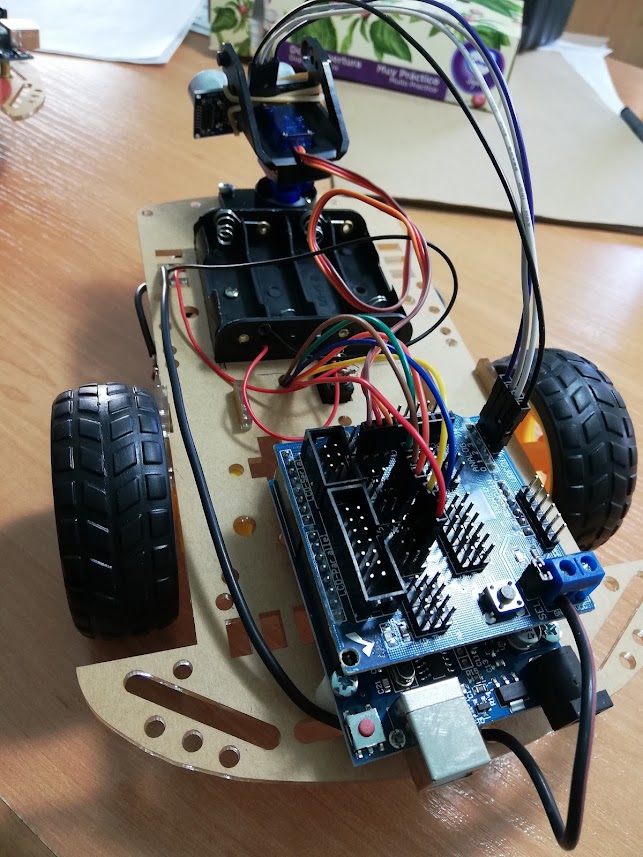
Colocamos ahora el sensor shield, (que sirve para hacer el conexionado más simple). solo hay
que tener cuidado y colocar los pines encima de la tarjeta de arduino tal como se ve en la foto
e introducirlos en ella.

El sensor de ultrasonidos se coloca con una goma, hilo o similar (cada uno como pueda):
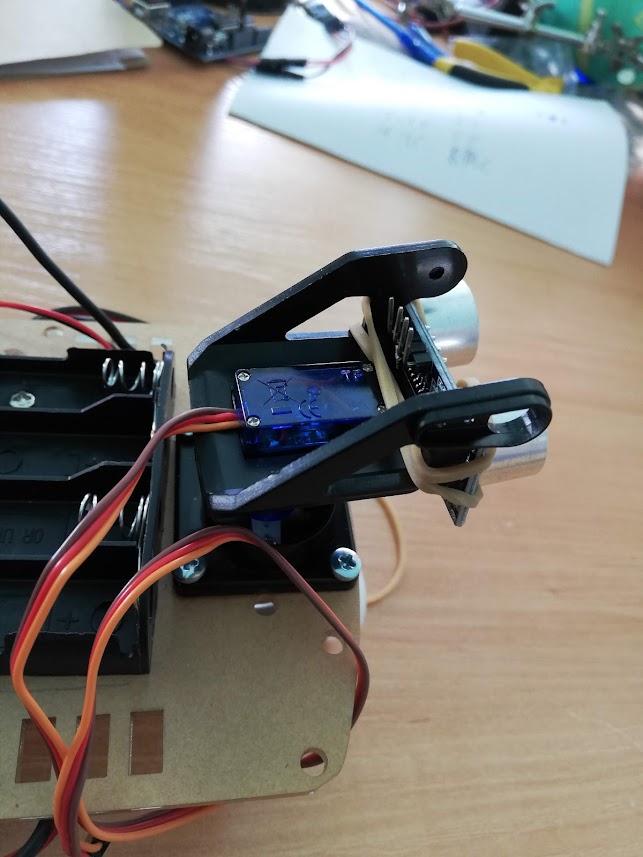
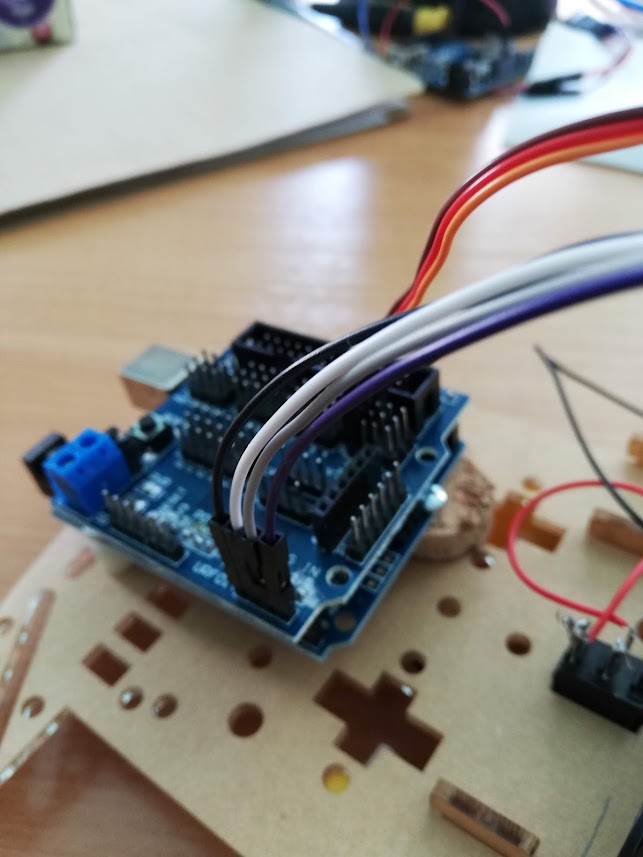
El conexionado del servo va a la fila 3 del sensor shield, tal como se ve en la foto:
El conexionado del sensor de ultrasonidos, va como se ve en la foto:

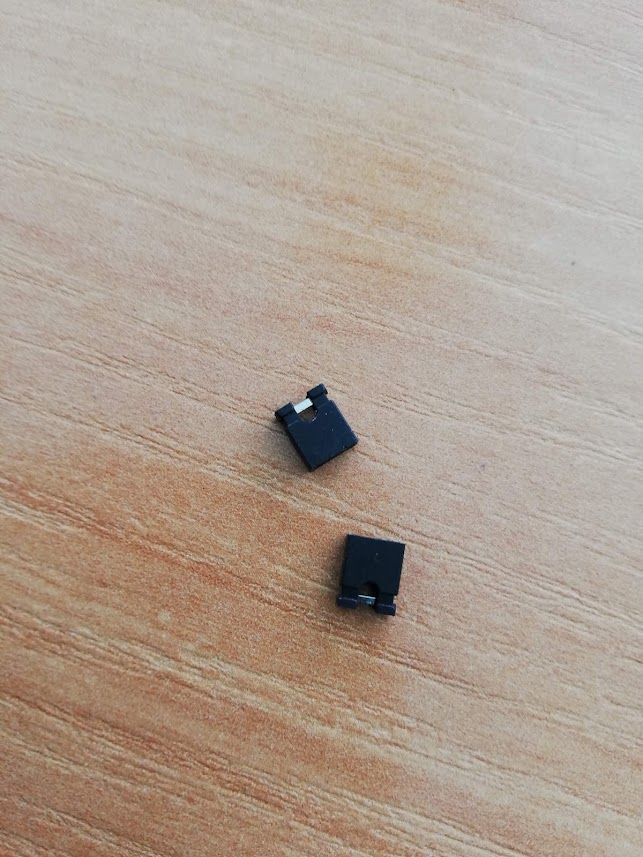
Quitamos los dos puentes de ENA e ENB:
Colocamos los 6 cables largos en el controlador de motores, cada uno de un color diferente:
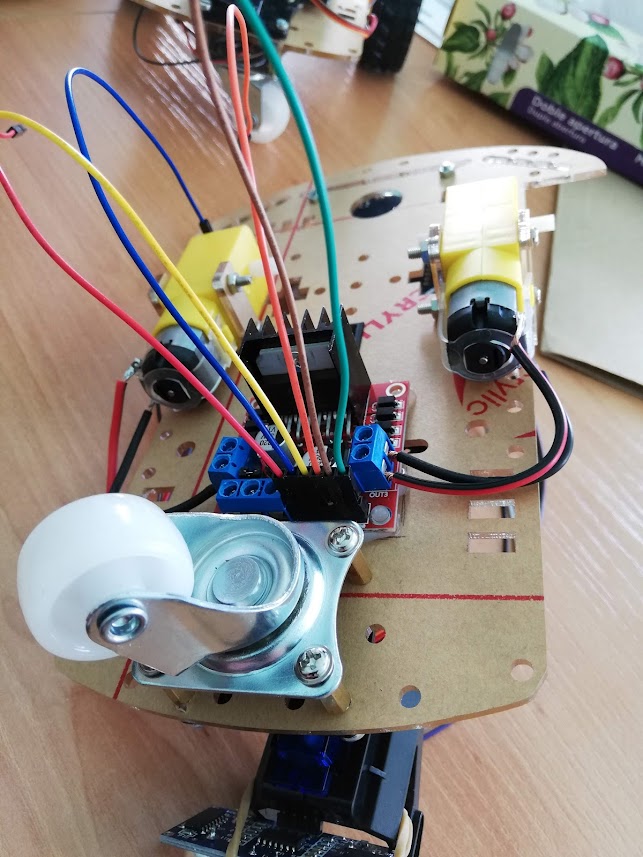
Los metemos por el agujero para pasarlos a la parte de arriba:
Y los conectamos en los pines 4 a 10, tal como se ven en la foto:

Colocamos las dos ruedas:
La masa al Arduino:
Y conectamos la pila de 9 V. con su portapilas:
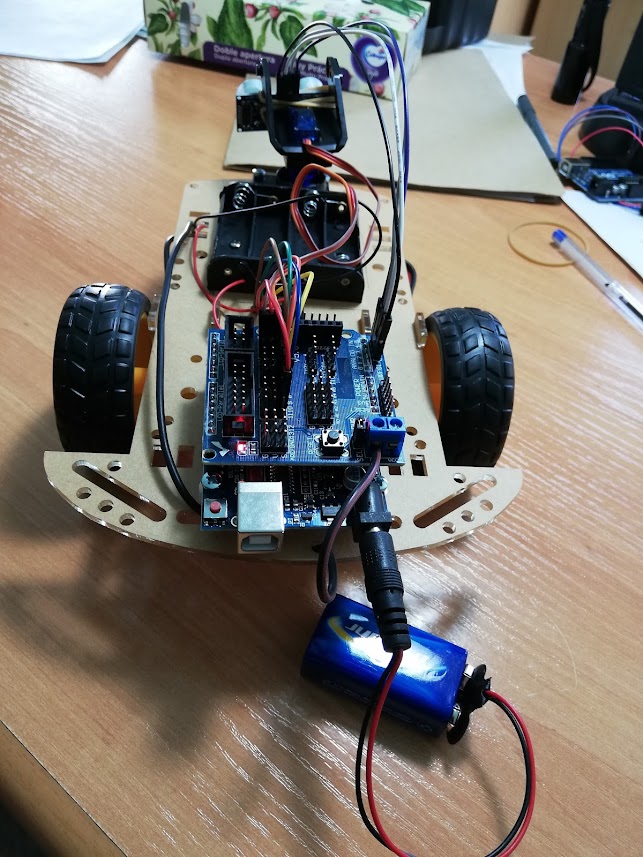
El coche robot, ya esta construido. Debemos pasar ahora a programarlo para ver que hace lo que queremos que haga.
No hay comentarios:
Publicar un comentario